|
Страница 1 из 2 Выше в данной главе поле потенциалов было определено как дополнительная функция затрат в планировании движений робота, но поле потенциалов может также использоваться для непосредственной выработки траектории движения робота, что позволяет полностью отказаться от этапа планирования пути. Для достижения этой цели необходимо определить притягивающее усилие, которое влечет манипулятор робота в направлении его целевой конфигурации, и поле потенциалов, отталкивающее манипулятор, которое отводит манипулятор от препятствий. Такое поле потенциалов показано на рис. 25.20. Его единственным глобальным минимумом является целевая конфигурация, а стоимость измеряется суммой расстояния до целевой конфигурации и дальности до препятствий. Для формирования поля потенциалов, показанного на этом рисунке, не требовалось никакого планирования. Благодаря такой их особенности поля потенциалов могут успешно применяться в управлении в реальном времени. На рис. 25.20 показаны две траектории робота, осуществляющего восхождение к вершине в поле потенциалов при двух различных начальных конфигурациях. Во многих приложениях поле потенциалов может быть эффективно рассчитано для любой конкретной конфигурации. Кроме того, оптимизация потенциала сводится к вычислению градиента потенциала для текущей конфигурации робота. Такие вычисления обычно являются чрезвычайно эффективными, особенно по сравнению с алгоритмами планирования пути, которые связаны с затратами, характеризующимися экспоненциальной зависимостью от размерностей пространства конфигураций (от степеней свободы). 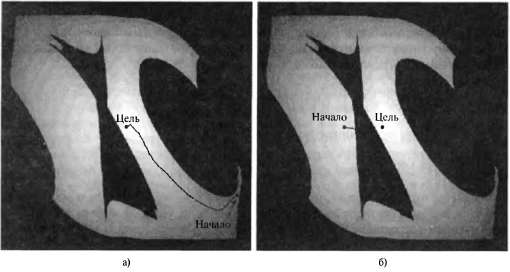 Рис. 25.20. Метод управления на основе поля потенциалов. Траектория робота восходит по градиенту поля потенциалов, состоящего из отталкивающих усилий, обусловленных наличием препятствий, и притягивающих усилий, которые соответствуют целевой конфигурации: успешно проделанный путь (а); локальный оптимум (б)
<< В начало < Предыдущая 1 2 Следующая > В конец >>
|