|
Страница 1 из 5 Для того чтобы создать сеть DBN, необходимо определить три вида информации: распределение априорных вероятностей по переменным состояния, ; модель перехода, ; модель перехода, , и модель восприятия,. , и модель восприятия,. Чтобы задать модель перехода и модель восприятия, необходимо определить топологию связей между последовательными срезами, а также между переменными состояния и свидетельства. Поскольку предполагается, что модели перехода и восприятия являются стационарными (одинаковыми для всех t), удобнее всего задать их для первого среза. Например, полная спецификация DBN для мира задачи с зонтиком дана с помощью сети с тремя узлами, показанной на рис. 15.9, а. На основании этой спецификации по мере необходимости может быть создана полная (полубесконечная) сеть DBN путем копирования первого среза. Чтобы задать модель перехода и модель восприятия, необходимо определить топологию связей между последовательными срезами, а также между переменными состояния и свидетельства. Поскольку предполагается, что модели перехода и восприятия являются стационарными (одинаковыми для всех t), удобнее всего задать их для первого среза. Например, полная спецификация DBN для мира задачи с зонтиком дана с помощью сети с тремя узлами, показанной на рис. 15.9, а. На основании этой спецификации по мере необходимости может быть создана полная (полубесконечная) сеть DBN путем копирования первого среза. 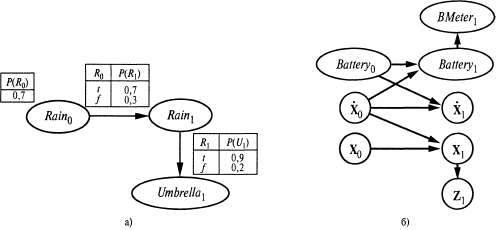 Рис. 15.9. Примеры создания сетей DBN: спецификация распределения априорных вероятностей модели перехода и модели восприятия для сети DBN задачи с зонтиком; предполагается, что все последующие срезы являются копиями среза 1 (а); простая сеть DBN для моделирования движения робота на плоскости Χ—Υ (б) Теперь рассмотрим более интересный пример: текущий контроль за роботом с аккумуляторным питанием, который движется на плоскости Х-Υ (о нем впервые шла речь в разделе 15.1). Прежде всего необходимо определить переменные состояния, в состав которых мы включим и переменную , обозначающую положение, и переменную , обозначающую положение, и переменную , обозначающую скорость. Предполагается, что для измерения координат положения используется определенный метод (возможно, фиксированная телекамера или бортовая система GPS (Global Positioning System— глобальная система позиционирования)), позволяющий получить результаты измерений , обозначающую скорость. Предполагается, что для измерения координат положения используется определенный метод (возможно, фиксированная телекамера или бортовая система GPS (Global Positioning System— глобальная система позиционирования)), позволяющий получить результаты измерений . Положение робота в следующем временном интервале зависит от текущего положения и скорости, как и при использовании стандартной модели с фильтром Калмана. Скорость в следующем временном интервале зависит от текущей скорости и состояния зарядки аккумулятора. Введем переменную . Положение робота в следующем временном интервале зависит от текущего положения и скорости, как и при использовании стандартной модели с фильтром Калмана. Скорость в следующем временном интервале зависит от текущей скорости и состояния зарядки аккумулятора. Введем переменную  для обозначения фактического уровня зарядки аккумулятора, родительскими переменными которой являются предыдущий уровень зарядки аккумулятора и скорость, а также введем переменную для обозначения фактического уровня зарядки аккумулятора, родительскими переменными которой являются предыдущий уровень зарядки аккумулятора и скорость, а также введем переменную , которая измеряет уровень зарядки аккумулятора. В результате будет получена исходная модель, показанная на рис. 15.9, 6. , которая измеряет уровень зарядки аккумулятора. В результате будет получена исходная модель, показанная на рис. 15.9, 6.
<< В начало < Предыдущая 1 2 3 4 5 Следующая > В конец >>
|