|
Страница 1 из 3 С неопределенностью можно также справиться, используя так называемые надежные, а не вероятностные методы. Надежным называется такой метод, в котором подразумевается наличие ограниченного объема неопределенности в каждом аспекте задачи, но не присваиваются вероятности значениям в пределах разрешенного интервала. Надежным называется такое решение, которое приводит к намеченной цели независимо от того, какие значения данных встречаются в действительности, при условии, что они находятся в пределах предполагаемого интервала. Крайней формой надежного метода является подход на основе совместимого планирования, описанный в главе 12, — в нем вырабатываются планы, выполнимые даже без учета информации о состоянии. В настоящем разделе рассматривается один из надежных методов, применяемый для планирования тонких движений (или сокращенно FMP — Fine-Motion Planning) в задачах робототехнической сборки. Планирование тонких движений обеспечивает перемещение манипулятора робота в очень тесной близости от объекта в статической среде. Основная сложность, связанная с планированием тонких движений, состоит в том, что требуемые движения и соответствующие характеристики среды очень малы. В таких малых масштабах робот теряет возможность точно измерять или управлять своим положением, кроме того, может возникать неопределенность в отношении формы самой среды; предполагается, что все эти неопределенности ограничены. Решением задачи FMP обычно становится условный план (или политика), в котором используется обратная связь от датчиков и который гарантирует успешное выполнение во всех ситуациях, совместимых с предполагаемыми пределами неопределенности. План проведения тонких движений представляет собой определение ряда охраняемых движений. Каждое охраняемое движение состоит, во-первых, из команды движения и, во-вторых, из условия завершения, которое представляет собой предикат, заданный на сенсорных значениях робота, и возвращает истинное значение в качестве указания на окончание охраняемого движения. Команды движения обычно задают приспособляемые движения, которые позволяют роботу выполнять скользящие движения, если другие команды движения вызовут столкновение с препятствием. В качестве примера на рис. 25.16 показано двухмерное пространство конфигураций с узким вертикальным отверстием. Такое пространство конфигураций может возникнуть при решении задачи вставки прямоугольного колышка в отверстие, немного превышающее его по размерам. Команды движения выполняются с постоянными скоростями. Условиями завершения являются ситуации контакта с поверхностью. Для моделирования неопределенности в процессе управления предположим, что фактически движение робота происходит не в направлении, указанном в команде, а укладывается в конус вокруг этого направления. На рис. 25.16 показано, что произойдет, если будет выдана команда движения с постоянной скоростью строго в вертикальном направлении из исходной области s. Из-за неопределенности в скорости робот может совершать движения в любом направлении в пределах конической огибающей; возможно, что это приведет к попаданию в отверстие, но с большей вероятностью колышек опустится с той или другой стороны от него. А поскольку робот не будет иметь информации о том, с какой стороны от отверстия опустился колышек, то не будет знать, куда его двигать дальше. вокруг этого направления. На рис. 25.16 показано, что произойдет, если будет выдана команда движения с постоянной скоростью строго в вертикальном направлении из исходной области s. Из-за неопределенности в скорости робот может совершать движения в любом направлении в пределах конической огибающей; возможно, что это приведет к попаданию в отверстие, но с большей вероятностью колышек опустится с той или другой стороны от него. А поскольку робот не будет иметь информации о том, с какой стороны от отверстия опустился колышек, то не будет знать, куда его двигать дальше. 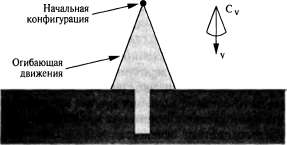 Рис. 25.16. Двухмерная среда, конус неопределенности скорости и огибающая возможных движений робота. Намеченная скорость равна ν, но из-за неопределенности фактическая скорость может находиться в пределах , а это приводит к тому, что окончательная конфигурация может определиться в любой точке внутри огибающей движения. Это означает, что возникает неопределенность в отношении того, удастся ли попасть в отверстие или нет , а это приводит к тому, что окончательная конфигурация может определиться в любой точке внутри огибающей движения. Это означает, что возникает неопределенность в отношении того, удастся ли попасть в отверстие или нет
<< В начало < Предыдущая 1 2 3 Следующая > В конец >>
|