|
Страница 3 из 4 3. Конечный этап состоит в увязке причинных связей. Если одной из причинных связей в первоначальном плане была , она заменяется множеством причинных связей от В ко всем этапам декомпозиции d' с предусловиями р, которые выполнены на этапе Start декомпозиции d (т.е. ко всем этапам декомпозиции d', для которых ρ является внешним предусловием). В данном примере причинная связь , она заменяется множеством причинных связей от В ко всем этапам декомпозиции d' с предусловиями р, которые выполнены на этапе Start декомпозиции d (т.е. ко всем этапам декомпозиции d', для которых ρ является внешним предусловием). В данном примере причинная связь заменяется связью заменяется связью  (Предусловие Money для действия PayBuilder в этой декомпозиции становится открытым условием, поскольку ни в одном из действий в первоначальном плане не выполнено действие по получению денег Мопеу для строительства дома BuildHouse.) Аналогичным образом, для каждой причинной связи (Предусловие Money для действия PayBuilder в этой декомпозиции становится открытым условием, поскольку ни в одном из действий в первоначальном плане не выполнено действие по получению денег Мопеу для строительства дома BuildHouse.) Аналогичным образом, для каждой причинной связи в плане необходимо предусмотреть ее замену множеством причинных связей к С от каждого этапа декомпозиции d', в котором выполняется предусловие ρ для этапа Finish в декомпозиции d (т.е. от этапа в декомпозиции d', для которого предусловие ρ является внешним результатом). В данном примере связь в плане необходимо предусмотреть ее замену множеством причинных связей к С от каждого этапа декомпозиции d', в котором выполняется предусловие ρ для этапа Finish в декомпозиции d (т.е. от этапа в декомпозиции d', для которого предусловие ρ является внешним результатом). В данном примере связь Finish заменяется связью Finish заменяется связью На этом завершаются дополнения, требуемые для формирования декомпозиций в контексте применения планировщика POP. Необходимость в дополнительных модификациях алгоритма POP связана с тем, что действия высокого уровня скрывают информацию об их конечных примитивных реализациях. В частности, в первоначальном алгоритме POP осуществляется возврат с индикатором неудачи, если текущий план включает неразрешимый конфликт, т.е. если одно из действий конфликтует с причинной связью, но не может быть переупорядочено так, чтобы оно находилось до или после этой связи (подобный пример приведен на рис. 11.4). При использовании действий высокого уровня, с другой стороны, с виду неразрешимые конфликты иногда могут быть разрешены путем декомпозиции конфликтующих действий и чередования их этапов. Соответствующий пример приведен на рис. 12.5. Таким образом, может возникнуть такая ситуация, что путем декомпозиции может быть получен полный и согласованный план из примитивных действий, даже если не существует полного и согласованного плана из действий высокого уровня. Такая возможность означает, что полный планировщик HTN не должен использовать многие варианты отсечения, которые предусмотрены для стандартного планировщика POP. Еще один способ организации работы может состоять в том, чтобы отсечение применялось в любом случае, в надежде на то, что ни одно решение не будет упущено. 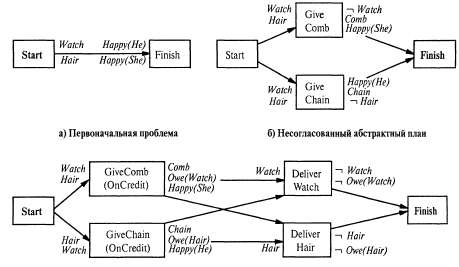 в) Декомпозиция плана б) для получения согласованного решения
|